
How many spots are under the leaf?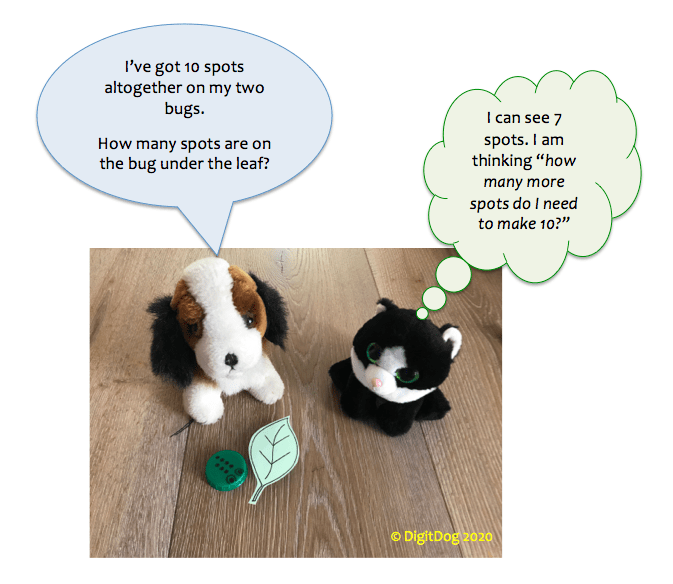
Digit Dog is using the bottle top bugs and leaves to create some number problems.
This type of problem encourages learners to think and talk mathematically and use the link between addition and subtraction.
Ask children to:
- Explain what the problem is about in their own words.
- Explain what information they know and what they are trying to find out. How many spots are on the bug they can see? What number of spots cannot be under the leaf?
- Find a way to work out how many spots are on the bug under the leaf.
- Describe the strategy they have used. They might:
- use counters to represent the spots and work out how many more they need to make 10
- draw pictures of the spots
- use number bonds – the numbers that add together to make 10.
- I know that 7 + 3 = 10 so there must be a 3-spot bug under the leaf.
- I know that 10 – 7 = 3 so there must be a 3-spot bug under the leaf.
- Convince everyone that their answer is correct. Use sentence starters such as:
- I know the answer is 3 because ….
- First of all I…………then I………
- I know that …….. so…………
- Write a number sentence
- Change the bugs – choose two different bugs, work out the total number of spots and then hide one under a leaf.
What if……….
……..you tried it with 3 bugs? Work out the total and then hide one bug under a leaf.
……..you tried multiplying the numbers? Hide one bug under a leaf but this time say “the product of my numbers is…..”
